Abstract
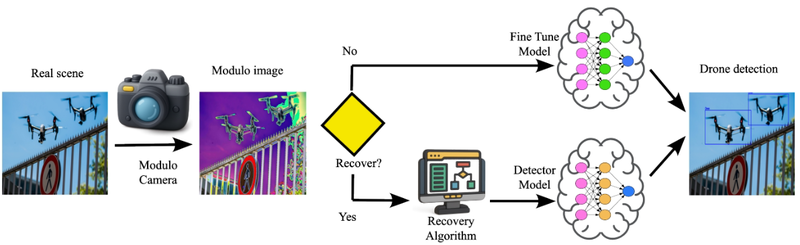
Drone detection under high-illumination conditions remains a critical challenge due to sensor saturation, which degrades visual information and limits the performance of conventional detection models. A promising alternative to overcome this issue is modulo imaging, an approach based on modulo-ADCs that reset pixel intensities upon reaching a predefined saturation threshold, thus avoiding saturation loss. This work presents a methodology based on fine-tuning a detection model using modulo images, allowing accurate object detection without requiring High Dynamic Range (HDR) image reconstruction. Additionally, an optional reconstruction stage using the Autoregressive High-order Finite Difference (AHFD) algorithm is evaluated to recover high-fidelity HDR content. Experimental results show that the fine-tuned model achieves F1-scores above 96% across different illumination levels, outperforming saturated and raw modulo inputs, and approaching the performance of ideal HDR images. These findings demonstrate that fine-tuning with modulo data enables robust drone detection while reducing inference time, making the reconstruction process optional rather than essential.